This week we gave our presentation number 2 to the Spartan Superway Team on our progress. We showcased our rapid prototype and received feedback on our design. Dr. Furman recommended looking into air dashpots and with an electronic orifice. My group and I need to finalize our design so that we can begin further analysis. A link to our slides is below
Presentation 2
Tuesday, October 31, 2017
Monday, October 30, 2017
Week 9: Preparing of Presentation 2
This week we had the 1/12th presentations that updated us on their progress. After, I started on setting up the presentation template on google slides to get a start on our presentation. I also added the rubric within the comments of the slides so that we can hit all the points.
I got the group to use google hangouts so that we can communicate over the mic as we work on the slides online. This really helped speed up the collaboration and will be something we will start to use. Furthermore, we came to an agreement that an active approach to our design with our original frame design will be a good balance of functionality.
I got the group to use google hangouts so that we can communicate over the mic as we work on the slides online. This really helped speed up the collaboration and will be something we will start to use. Furthermore, we came to an agreement that an active approach to our design with our original frame design will be a good balance of functionality.
Week 8: Further Evaluation on Design
This week the group and I discussed how we might be able to reduce the pitch swinging due to the longitudinal acceleration. It was found from the previous calculation that 14.3 degrees of angular deflection to be of significance for passenger discomfort. The group and I had some trouble of figuring out possible solutions within the scope of a passive approach.
I brought up that the reason we are having a difficulty with coming up with a final design that would stop or reduce pitch swinging is because we have limited our designs to passive only. The group and I discussed that a complete revision of the design may be needed. As we were discussing, AJ and the summer half-scale team joined our discussion and mentioned that linear actuator can be used to control the pitch swinging.
So our group then focused our attention on using a linear actuator in the frame of our original design to have control. The linear actuator can be used statically (off) for longitudinal acceleration and used dynamically (on) in cohesion with the gravity effects to pitch-level the pod-car while traversing on the inclines.
I brought up that the reason we are having a difficulty with coming up with a final design that would stop or reduce pitch swinging is because we have limited our designs to passive only. The group and I discussed that a complete revision of the design may be needed. As we were discussing, AJ and the summer half-scale team joined our discussion and mentioned that linear actuator can be used to control the pitch swinging.
So our group then focused our attention on using a linear actuator in the frame of our original design to have control. The linear actuator can be used statically (off) for longitudinal acceleration and used dynamically (on) in cohesion with the gravity effects to pitch-level the pod-car while traversing on the inclines.
Week 7: Rapid Prototyping Issues
This week we had a seminar by Dr. Du about the final report guidelines for one hour. Shortly after we headed back to our class and the group and I discussed what problems arose from the rapid prototype.
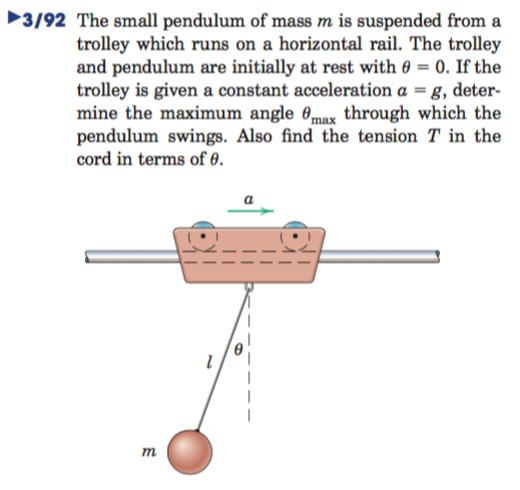
I mentioned we should find out how much pitch swinging we should expect to encounter in the half scale suspension to find out if it is even severe for passenger discomfort. I remember there was a similar problem in our dynamic textbook that would allow us to calculate what the maximum angle would be, given a longitudinal acceleration.
It is found that the maximum deflection is not a function of the distance L or mass of the hanging weight, but rather of the longitudinal acceleration and gravity relationship. Given a longitudinal acceleration of 2.5 m/s^2, the maximum angle of through which the pendulum swings is 14.3 degrees, which is of significant value for passenger discomfort.
I mentioned we should find out how much pitch swinging we should expect to encounter in the half scale suspension to find out if it is even severe for passenger discomfort. I remember there was a similar problem in our dynamic textbook that would allow us to calculate what the maximum angle would be, given a longitudinal acceleration.
 |
Wednesday, October 4, 2017
Week 6: Rapid Prototyping for Concept Design
Half-Scale Suspension Team
Saturday, September 30, 2017
Below are links to download and/or view the videos of our concept design in action as in Figure 4.
Video 1: Demonstrating working principle for half scale suspension
Video 2: Demonstrating half scale suspension of pod car while traversing inclined rail
We have confirmed the passive suspension for leveling the pod-car while transversing inclines will work and confirmed our concern that there will be swinging needed to be dampened. Further prototyping will be planned.
Saturday, September 30, 2017
Today my group and I met at my home garage from 12-5pm to work on rapid prototyping our concept design for the purpose of evaluating the feasibility. Using the sketch of the design, we imitated the linkage with popsicle sticks, fasteners for the pivots, closet bearings used as sliders to replicate the rail bogies, and lastly, a wire used to replicate an uneven rail. I set up the workstation in my home garage and prepped the tools we would need. Tools: Drill press, drill bits, thin circular file, table disk sander, and wire clippers. We then began construction, as can be seen, the progress in the figures below.
 |
| Figure1: Colin using the drill press for the pivot holes on links |
 |
| Figure 2: Linkage concept, yellow will be the hanging link in connection with the pod-car. |
 |
| Figure 3: Completed prototype one with demonstrated leveled hanging weight (pod-car) on inclined rail |
 |
| Figure 4: Rapid prototype rail system for demonstrating working principle of half-scale suspension for pod-car traversing inclined rail |
Below are links to download and/or view the videos of our concept design in action as in Figure 4.
Video 1: Demonstrating working principle for half scale suspension
Video 2: Demonstrating half scale suspension of pod car while traversing inclined rail
We have confirmed the passive suspension for leveling the pod-car while transversing inclines will work and confirmed our concern that there will be swinging needed to be dampened. Further prototyping will be planned.
Monday, October 2, 2017
Week 5: On Going presentations
This week, sub-teams gave presentations on their project goals with specifications and a list of problems they may encounter throughout the semester. The full-scale teams and our half-scale suspension team gave presentations in which we were able to give and accept helpful advice or comments. Seeing the presentation slides and hearing what the Dr. Furman and Ron Swenson like about certain slides is good to take note on so that we can improve our presentations in the future. For example, having a zoomed in screenshot of the Gantt chart really helps the viewers understand the information. I will make sure that improvements like this are made in the future presentations.
Subscribe to:
Comments (Atom)